안녕하세요~! 쮜범이입니다 ^_^
매년 겨울이 찾아올 때마다 뉴스에서는 몇십 년 만에 혹은 몇 백 년 만에 오는 폭설로 출퇴근길을 주의하라는 말을 자주 듣게 된다. 서울의 경우 전체 교통의 80%가 마비될 수준이니 자동차로 이동을 해야만 하는 사람들한테는 이보다 악조건은 없을 것이다. 그럼에도 불구하고 멈춰있는 차들 사이로 꿋꿋하게 뚫고 나가는 차들이 있다. 가끔 그 기능에 감탄하는 나 자신과 함께 초라한 내 자동차를 보고 있으면 눈물이 난다.

자동차 구동 방식에는 2륜 구동과 4륜 구동으로 구분된다.
2륜 구동 방식은 앞, 뒤 바퀴 중 한쌍의 바퀴에만 동력이 전달되는 방식이다.
1. 앞 바퀴 구동인 전륜 2륜 구동 - 동력이 앞쪽 바퀴에만 전달되는 구동 방식
2. 뒤 바퀴 구동인 후륜 2륜 구동이 - 동력이 뒤쪽 바퀴에만 전달되는 구동 방식
4륜 구동 방식은 앞, 뒤 바퀴 모두에 동력이 전달되는 방식이다. 여기에는 파트타임 4륜 구동과 상시 타임 4륜 구동이 있다.
1. 파트타임 4륜 구동 - 평상시 주행할 때는 2륜 구동을 사용하다가 미끄러운 도로나 비포장 도로에서는 4륜 구동을 사용하는 방식
2. 풀타임 4륜 구동 - 운전자의 의지와 관계 없이 항상 상시로 네 바퀴 굴림이 유지되는 구동 방식
4륜 구동방식을 사용하는 자동차의 장점
2개의 바퀴만 동력을 전달하는 2륜(전륜 구동과 후륜 구동) 구동과는 다르게 4개의 바퀴 모두 동력을 전달하는 4륜(모든 바퀴 구동)은 동력이 모두 골고루 분배가 된다. 우리가 타는 자동차는 대부분 엔진이 앞에 탑재되는 프런트 엔진 타입을 사용한다.
이로 인해 만약 내 자동차가 뒷바퀴만 동력을 구동하는 2륜 후륜 구동 방식을 사용한다면 뒤쪽에 무게가 충분히 실리지 않아서 눈길이나 빗길에서 바퀴가 헛도는 경우가 생기게 된다. 반면 앞바퀴와 뒷바퀴 모두 굴러간다면 프런트 엔진의 무게가 앞바퀴를 눌러주기 때문에 눈길이나 빗길에서 출발할 때 바퀴가 헛돌지 않고 잘 굴러갈 수 있게 된다.
물론 4륜 구동이라고 해서 눈길이나 빗길에서 무조건 안전한 것은 아니다. 이와 같은 노면 상황에서 지면과 타이어의 마찰력이 없어지면 4륜이나 2륜 구동 차가 평상시보다 미끄러지는 건 동일하기 때문이다. 눈길이나 빗길 상황에서 4륜 구동과 2륜 구동의 차이점은 출발할 때 나타나지 정지할 때 나타나는 게 아니다.
이런 악조건의 노면 상태에서는 구동방식에 상관없이 한번 미끄러지기 시작하면 위험한 건 마찬가지다. 그러니 첫 번째로 노면 상태가 악조건이라면 어떤 구동방식을 사용하던 위험한 건 똑같다. 단지, 탈출 능력이나 뚫고 나가는 성능을 보았을 때 4륜 구동이 2륜 구동보다는 뛰어나기 때문에 그 효율성을 보고 판단하는 것이다.
4륜 구동을 부르는 방식은 다양하다. '4-Wheel Drive(4륜 구동)', AWD(ALL Wheel Drive)라고 칭하기도 한다. 보통 4WD는 일시 4륜 구동 방식 등에서 별도의 험로 주파 그리고 등판 등력 향상을 위한 로우 기어가 있는 경우를 지칭한다.
4륜 구동의 특허는 1893년부터 시작되었고 20세기 초반에 여러 나라와 회사에서 생산되었다. 2차 세계 대전 이후 1972년 스바루가 승용차 전용 AWD의 시초라고 할 수 있는 '레오네'라는 차량을 발매했다. 그러나 독일의 아우디가 1980년 4륜 구동 시스템인 콰트로(Quattro)를 개발하면서 세계적으로 선풍적인 인기를 끌게 되었다.
AWD(All Wheel Drive)

4륜 구동 시스템인 AWD(All Wheel Drive)는 4WD(4 Wheel Drive)와 약간의 차이점이 있다. AWD는 로우기어가 없으며 운전자 임의대로 4륜 구동 및 2륜 구동으로 전환할 수 있는 별도의 조작 장치가 없이 상시 자동으로 작동한다.
4륜 구동에서 파트타임과 풀타임은 사용목적에 따라서 분류할 수 있다. 앞/뒷바퀴의 회전차를 흡수하는 센터 디퍼렌셜을 갖춘 AWD 방식은 고속 주행 안전성이 뛰어나고 각 바퀴별로 구동력을 배분하는 시스템을 결합하는 것이 적합하다.
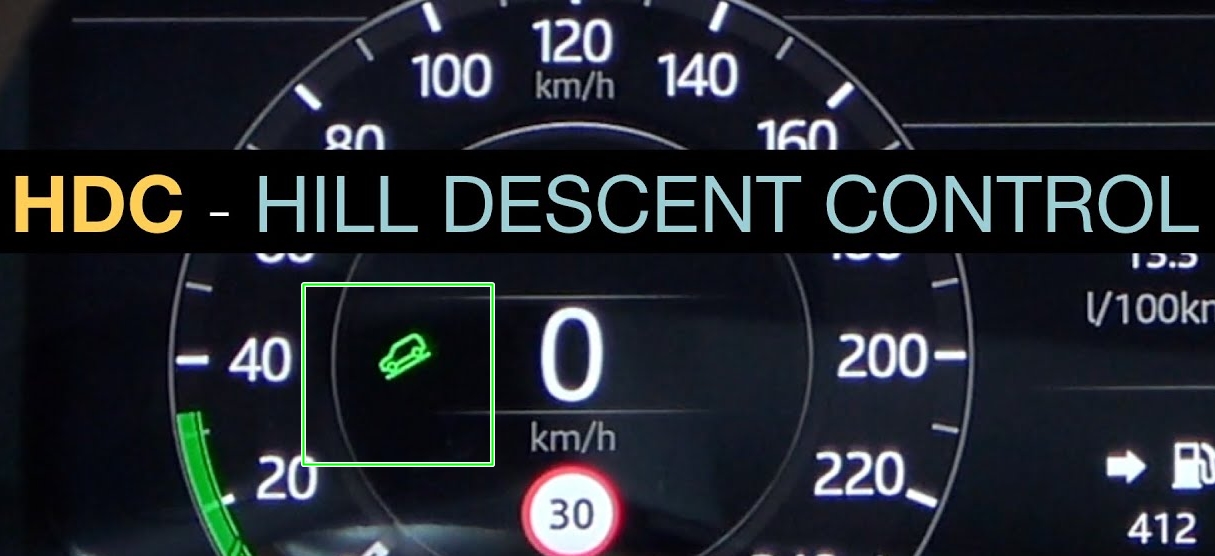
그러나 센터 디퍼렌셜 때문에 앞쪽 내지는 뒤쪽이 완전히 빠져버릴 만한 험로에서는 전혀 힘을 쓰지 못한다는 치명적인 단점이 존재한다. 이 때문에 험한 주행 조건에서 주행할 일 없는 도심형 차량에 주로 사용된다. 그나마 거친 환경 주행이 필요할 수도 있는 SUV 차량의 경우 로우 기어의 엔진 브레이크를 대신할 보조 장비로 HDC(Hill Descent Control)이 사용된다.
주 구동축과 보조 구동축의 굵기나 강성이 앞/뒤 다 동일한 4WD와는 다르게 AWD는 극히 일부 차종을 제외하고 대부분 보조 구동축의 굵기와 강도가 주 구동축에 비해 매우 떨어지는 특징을 가지고 있다. 보조 구동축이 주 구동축에 비해 굵기와 강도, 내구성이 떨어지는 이유는 연비 상승과 원가절감이 주요 원인으로 꼽힌다.
더 나아가 이 둘의 차이점을 이용해 개발 편의성을 높이고자하는 브랜드의 의도도 숨겨져 있다. AWD가 주로 사용되고 있는 일반적인 승용차나 도심 전용 SUV의 경우 정동 4WD 자동차들처럼 험로 주파나 무거운 물체를 견인할 필요가 없다.
모든 브랜드는 4륜 구동의 최대 단점이었던 연비를 개선하기 위해서 이런 사용환경에 주목하고 구동계를 경량화시키기 위해 엄청난 노력을 쏟아부었다. 그러나 마냥 경량화를 진행하다간 4륜 구동이 작동되자마자 구동계에 엄청난 손상을 일으킬게 뻔하다.
그래서 정통 4WD처럼 보조 구동축에 전달하는 최대 구동력을 엔진 출력에 맞추지 않고 차량에 부착된 휠&타이어가 노면에 전달할 수 있는 최대 구동력까지만 세팅되도록 기준을 잡고 구동계의 강도와 사이즈를 최대한 가볍게 만들고 있다.

어차피 도심형 SUV의 경우도 아주 험한 오프로드 주행을 하는 게 어렵기 때문에 별 문제가 되는 것 같지 않지만 최근 레저 스포츠가 다시 각광받으면서 트레일러를 견인하는 경우가 많아졌다. 이때는 무거운 보조 장치를 별도로 장착하기 때문에 문제가 발생할 가능성이 높아진다.
트레일러를 견인하게 되면 일반적으로 차량 후방에 장착된 트레일러 무게 때문에 뒤 차축이 평소보다 많은 무게를 받치게 된다. 이 때문에 자동차의 앞바퀴 접지력은 감소하게 되며 뒤 타이어는 마찰력이 평소보다 좋아지는 이상한 현상을 겪게 된다.
그래서 각 브랜드는 제조 과정에서 나름 본인들이 계산하고 세팅해놓은 스키드 토크 제한값을 정해놓는다. 그러나 무분별한 견인 사용으로 인해 스키드 토크 제한 값을 넘겨버리면 실제로 차량이 앞으로 나아가야 할 때 요구되는 구동력이 제한된 휠 토크보다 더 커져야 하는 문제가 생각보다 자주 발생하게 되었다. 트레일러를 차 앞쪽에 설치해서 후진으로 잡아당기는 경우는 100% 없다고 보면 된다.
주 구동축이 후륜 구동인 FR 기반의 AWD 차량들은 별로 문제가 되지 않으나 AWD 차량의 경우는 무거운 트레일러를 매달고 급경사를 오르거나 내릴 때 출발하려는 상황에서 구동축만 열심히 헛돌려 번아웃을 하게되며 보조 구동축은 별 힘을 쓰지 못하게 되는 현상을 마주하게 된다.
차량이 앞으로 나아가지 못하는 상황에서 비까지 오면 자동차 자력으로 견일할 생각은 둘째고 견인차까지 오게 되는 최악의 상황까지 오게 된다. 이때 무리하게 탈출을 시도하다가는 보조 구동축 디퍼렌셜 앞에 붙어있는 값비싼 커플링 장치가 사망하는 경우까지 발생하게 된다.
주 구동축이 전륜 구동인 FF 기반의 AWD 차량들은 과격한 급경사를 올라갈 때 특별히 트레일러 견인을 하지 않는 상황임에도 불구하고 보조 구동축인 뒷 차축이 아주 많이 눌리게 된다. 간단히 보조 구동축의 스키드 토크 제한값을 넘어가버리는 상황이 되어 주 구동축인 앞바퀴만 열심히 헛돌게 되며 보조 구동축인 뒷바퀴는 힘을 전혀 쓰지 못하는 모습을 볼 수 있다.
풀 타임(Full Time) VS 온 디맨드(On-demand)
도심형 세단&SUV에 사용되는 AWD 시스템 중 대부분은 온 디맨드(On-demand) 방식을 사용한다. 온 디맨드 방식은 평소에는 100% 전륜으로 구동되는데 어떤 상황에서 뒷바퀴의 슬립이 감지되면 트랜스퍼 장치의 클러치가 잠겨져 후륜으로도 토크가 전달되는 시스템이다.
닛산 로그의 경우 전/후륜 토크 배분이 가속 시 50:50이며 정속 주행 시 100:0이고 커브 주행 시 70:30의 비율로 토크가 동적 전환되는 간헐적 온 디맨드 방식을 사용한다. 반면 독일 브랜드인 BMW의 xDrive(x 드라이브)나 AUDI의 Quattro(콰트로)의 경우 항상 전륜과 후륜에 토크가 배분되는 상시 사륜 시스템을 사용한다.
4WD(Four Wheel Drive)
4WD(4 Wheel Drive)는 험지형 4륜 구동 혹은 정통 4륜 구동이라 칭한다. 상시 사륜 구동의 경우 AWD와 큰 차이는 없다. 트랜스 퍼 케이스가 2단계로 작동해서 기어비를 2~3배 이상으로 뻥튀기시키는 로우기어를 갖추고 있다.
센터 디퍼렌셜이 존재하지 않아 흔히 '오프로더'의 명칭이 붙는 정통 SUV, 픽업트럭에 주로 적용되며 견인력과 험로 주파력을 중요시하는 전통적인 사륜 구동 시스템들이다. 4WD에도 온 디맨드 방식과 풀타임 방식이 있다.
이 두 가지 방식은 상당히 비싼 고급 모델에만 장착되기 때문에 가장 흔하게 접할 수 있는 것은 운전자가 구동방식을 변경해야 하는 파트타임의 4륜 구동 방식일 확률이 크다. 4WD의 풀타임 사륜 구동 방식은 험로 주파력을 위해 AWD와는 다르게 센터 디퍼렌셜이 없고 앞뒤 바퀴 회전차를 비스커스 커플링이 단독으로 감당하는 방식이 대부분이다.
온 디맨드 방식은 미국의 보그 워너라는 브랜드가 개발한 TOD(Torque On Demand) 시스템과 같이 온디맨드 AWD와 동일하게 미끄러짐을 감지하면 컴퓨터가 알아서 트랜스 퍼 케이스의 클러치와 추축 동력 전달 클러치를 작동시켜 4륜 구동으로 변환시킨다.
험로에서의 주파력을 위해 센터 디퍼렌셜이 없는 관계로 차량이 선회 시에 앞/뒤 바퀴의 회전차를 흡수하는 능력이 AWD 대비 상대적으로 미약하기 때문에 포장도로에서 타이트 코너 브레이크 현상을 겪을 수 있다. 특히 고속 주행 시 선회를 하면 차량이 어딘가 튄다는 느낌과 함께 상당히 부자연스러운 이질감적인 움직임을 구사한다.
앞에서 언급한 상시 사륜 구동 시스템들은 미약하게나마 전/후륜의 회전차를 흡수하는 기능이 그나마 있긴 하다. 그러나 이런 기능이 전혀 없는 파트타임 사륜 구동 시스템이 장착된 차량의 경우 포장도로에서 4륜 구동을 넣을 경우 타이트 코너 브레이킹 현상을 물론이고 처음에는 괜찮은 것 같다가도 시간이 지나면서 데미지가 누적되면 4륜 구동과 관련된 장치들의 부품이 처참하게 망가지는 현상을 맛볼 수 있게 된다.
심한 경우 트랜스퍼 케이스를 고정시켜 놓은 프레임 부분까지 손상되는 경우도 있으니 조심하는 게 좋다. 앞/뒤 바퀴의 회전차가 흡수되지 않으면 주행 안정성에는 전혀 도움이 되지 않으니 비가 오거나 눈이 온다고 해서 괜히 4륜을 넣었다가 후회하지 않는 게 좋다.
이렇게 불편한 단점에도 불구하고 로우 기어의 엄청난 활용성과 앞/뒤 회전차를 흡수하는 장치가 없기 때문에 한쪽이 완전히 빠져버려도 아무렇지도 않게 빠져나오게 되는 놀라운 주파력은 많은 사람들에게 사랑을 받고 있다. 또한 간단한 구조로 인해 쉬운 정비성과 내구성이 좋다는 장점 때문에 오프로드 매니아나 정통 SUV 매니아들의 절대적인 지지와 사랑을 받고 있는 것은 사실이다.
검색창에 쮜범이 & 양재 대영모터스를 검색하세요~!



'쮜범이 CAR LIFE > 쮜범이 수업 자료' 카테고리의 다른 글
| 4륜 구동의 핵심 기술 센터 디퍼렌셜(Center Differential)과 트랜스퍼 케이스(Transfer case)의 차이점 (0) | 2022.12.30 |
|---|---|
| AWD(All Wheel Drive)와 4WD(Four Wheel Drive) 확실하게 구분하는 방법 (0) | 2022.12.25 |
| 각종 포털사이트, SNS에서 높은 조회수를 기록한 교통 사고 합의 요령 (0) | 2022.12.03 |
| 듀얼 클러치 트랜스 미션의 역사(DCT : Dual Clutch Transmission) (0) | 2022.11.26 |
| 자동차 슬라럼 테스트(Slalom Test)가 필수적으로 필요한 이유 (0) | 2022.11.24 |




댓글